MOVE POINTS REMAINING



Drive the Mars Rover to obtain a soil sample. Program your rovers to stop next to the SOIL to take a sample. The Mars rover mobility system is able to go over a rock that's twice the diameter of the wheel.
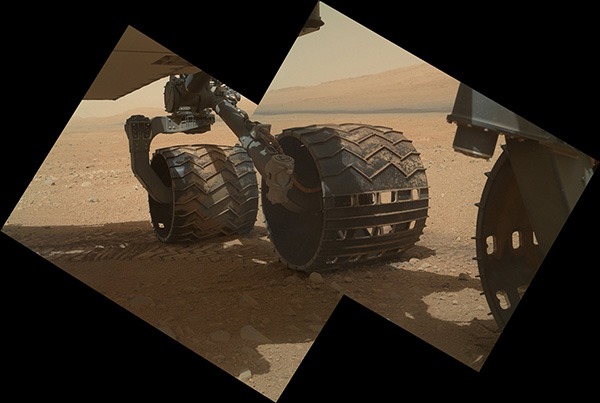
The wheels can move at different rates so if a wheel hits a rock, that wheel would move faster up and over, and the back wheels would slow down to keep from pushing the first wheel into the rock. The rover can handle most rocks but watch out for big rocks!
Drive around big rocks or the Rover will be stopped and the mission will be aborted.
Photos credit: NASA
CLICK HERE TO START
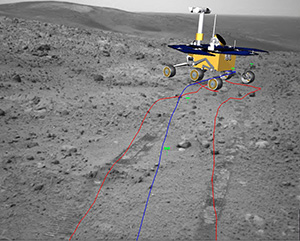
Testing the commands on a simulated rover in a computer, before they’re sent to the actual rover on Mars, helps determine what actions work best. A Mars rover driver is also called a “rover planner,” since so much of the driving plan is figured out long before the wheels start spinning to determine where a rover can go and how it’s going to get there.
TRY AGAIN
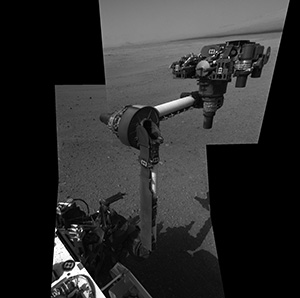
Rover drivers do more than drive, they operate all parts of the rover. So, for instance, they’ll make sure a rover’s arm is placed in the right position to retrieve samples. Considering what could go wrong with every move a rover makes, drivers must plan ahead.
DRIVE ANOTHER MISSION
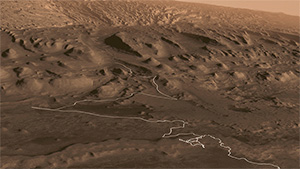
The rovers were designed to trek up to 100 meters (about 110 yards or 328 feet) across the martian surface each martian day, though they have gone much farther. While a complete martian day (called a sol) is about 24 hours and 40 minutes long (or 24 hours 37.5 minutes), the Sun can only provide enough power for driving during a four-hour window around high noon. That means the rovers must move quickly and along an efficient path.
TRY AGAIN
Close this window and press the play button to run the rover driving program or press the red reset button to clear all moves and start over.
CLOSE
The rover did not reach the mission's end. Please try again.
TRY AGAIN